혁신기술
고객이 믿고 맡길 수 있는 선도적 엔지니어링 그룹입니다.
건설로보트 (교량 외관조사 자동화 시스템)
국내 로봇시장은 산업로보트 위주로만 발달되어 있으며, 건설관련 분야의 로봇 개발은 건설공사의 특성 및 노임수준 때문에 극히 초보단계에 있습니다. 최근 경제회복과 함께
인간이 접근하기에 열악하며 유해한 환경에서의 효과적인 현장작업을 수행하기 위하여 일본에서는 건설로보트가 개발되어 사용되기 시작하였습니다. 당사는 국내의 현황을
적극 감안하여 우선 교량 하부 안전 점검용 로봇을 세계최초로 개발하였고, 계속하여 장대터널, 공동구, 하수도, LNG TANK검사 등에 적용할 수 있도록 개량 중입니다.
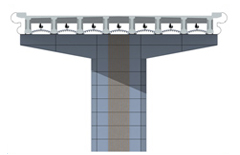
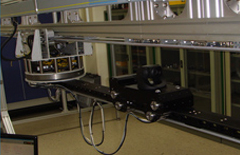
교량 외관조사 자동화 시스템
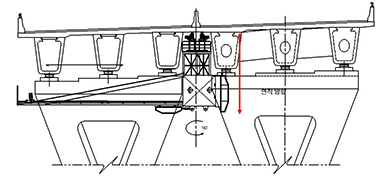
시작품 (1차)




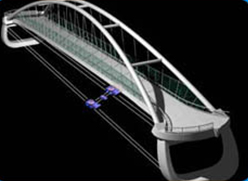
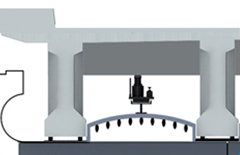
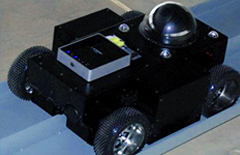
시작품 (2차)




서소문 고가차도에 시범적용
특허
토목자동 원격계측시스템 (1999.10.13)
감지장치 내 자체 이상점검 장치 (2001.09.17)
비젼시스템을 이용한 교량의 결함조사 방법 및 장치 (2002.10.21)
센서 보호박스를 구비한 진동현식 숏크리트 응력계 (2003.01.06)
터널의 내공변위 측정용 핀 및 이를 이용한 핀 설치방법 (2005.03.11)
토목 공사 및 가정용 적층 가능한 포대자루 및 그의 제조방법 (2005.07.21)
교량 하부 결함 점검장치 (2007.02.20)
피에이치씨 파일의 볼트 체결식 조인트 슈 (2007.02,21)
감지장치 내 자체 이상점검 장치 (2001.09.17)
비젼시스템을 이용한 교량의 결함조사 방법 및 장치 (2002.10.21)
센서 보호박스를 구비한 진동현식 숏크리트 응력계 (2003.01.06)
터널의 내공변위 측정용 핀 및 이를 이용한 핀 설치방법 (2005.03.11)
토목 공사 및 가정용 적층 가능한 포대자루 및 그의 제조방법 (2005.07.21)
교량 하부 결함 점검장치 (2007.02.20)
피에이치씨 파일의 볼트 체결식 조인트 슈 (2007.02,21)
실용시안
센서 보호박스를 구비한 진동현식 숏크리트 응력계 (2001.03.15)
터널의 내공변위 측정용 핀 (2002.02.22)
토목 공사 및 가정용 적층 가능한 포대자루 (2002.04.17)
터널 계측용 접이형 앵커장치 (2004.12.28)
지중경사계의 센서방향 조절장치 (2005.08.01)
지중경사계의 진동방지 장치 (2005.09.26)
터널의 내공변위 측정용 핀 (2002.02.22)
토목 공사 및 가정용 적층 가능한 포대자루 (2002.04.17)
터널 계측용 접이형 앵커장치 (2004.12.28)
지중경사계의 센서방향 조절장치 (2005.08.01)
지중경사계의 진동방지 장치 (2005.09.26)
프로그램
지반계측
Eun Jin Geo-Plus : 97-01-12-0881 (1997.03.10)
구조계측
CIMS-Data Monitoring 1.0 : 99-01-25-0893 (1999.03.10)
CIMS-Data Acquisition 1.0 : 99-01-25-0894 (1999.03.10)
교량 통합계측 모니터링 프로그램 : 2004-01-129-002797 (2004.06.14.)
CIMS-Data Acquisition 1.0 : 99-01-25-0894 (1999.03.10)
교량 통합계측 모니터링 프로그램 : 2004-01-129-002797 (2004.06.14.)
이제이텍 글로벌 네트워크








463-871 경기도 성남시 분당구 미금로 33번길 10 석정빌딩E-mail: ejtech@ejtech.netTel: 031-711-4880Fax: 031-711-6311
COPYRIGHT 2017 EJTECH All RIGHTS RESERVED.
